英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
本科生毕业论文外文文献翻译
题 目 不确定统一混沌系统的滑模控制
不确定统一混沌系统的滑模控制
Guuml;nyaz Ablay
俄亥俄州立大学哥伦布分校,美国 俄亥俄州 43210
摘要:本文通过滑模控制研究了不确定统一混沌系统的混沌控制。引入比例积分滑模面以获得滑模控制律。为了证实所提方法的有效性,数值模拟以图形的方式呈现。
关键词:混沌控制;不确定混沌系统;滑动模式;统一混沌系统
1.介绍
在一个确定性系统中,混沌是一个周期性长期行为,其表现出对初始条件敏感的依赖性[1]。混沌行为的基本特征来自于系统的内部结构,它比限制周期行为更为复杂。如今,混沌在许多工程系统中具有许多有用的应用,例如化学反应器,遗传控制系统,功率转换器,激光器,生物系统和安全通信系统[1,2]。混沌可用于过程中的混合传播,比如在对流传热过程中。然而,混沌行为也可能产生不良影响,例如在电网中引起不受控制的振荡,并且可能需要进行调节[2]。
在引入混沌控制之后,它已成为非线性科学的一个重要领域,并提出了各种控制方法。Ott-Grebogi-Yorke(OGY)方法[3],变结构控制[4],非线性反馈控制[5],还有一些其他方法[6,7]都已成功应用于混沌系统。滑模控制是其中一种方法[8,9]。最近,人们对使用滑模控制来控制混沌系统给予了极大的关注。滑模控制对于控制具有可变结构的系统十分有效,并提供了一种系统的方法来解决在建模不精确时保持稳定性和一致性的问题[10-12]。滑模控制由于其能够承受干扰和动态模型的不确定性而特别优选。
混沌系统包括非线性部分以及一些通常无法精确定义的参数[13,14]。因此,诸如具有强鲁棒性的滑模控制具有处理这种不确定性的能力的优点。在这项研究中,引入了比例积分(PI)滑模面,并通过满足可达性条件,为不确定统一混沌系统的混沌控制开发了一种合适的滑模控制律,最近由Luuml;等人提出[15]。具有单个可调参数的统一混沌系统表现出包涵Lorenz[16],Chen[17]和Luuml;[18]混沌系统的所有混沌行为,它们都有三个参数。Lorenz型系统,或统一的混沌系统,可见于大气科学,激光设备和其他与对流有关的系统。
本文通过滑模控制研究了不确定混沌系统的混沌控制。在第二节中,给出了一个不确定统一混沌系统的混沌控制。在第三节中,通过数值模拟验证了该方法的有效性,最后给出了结论。
2.统一混沌系统的滑模控制
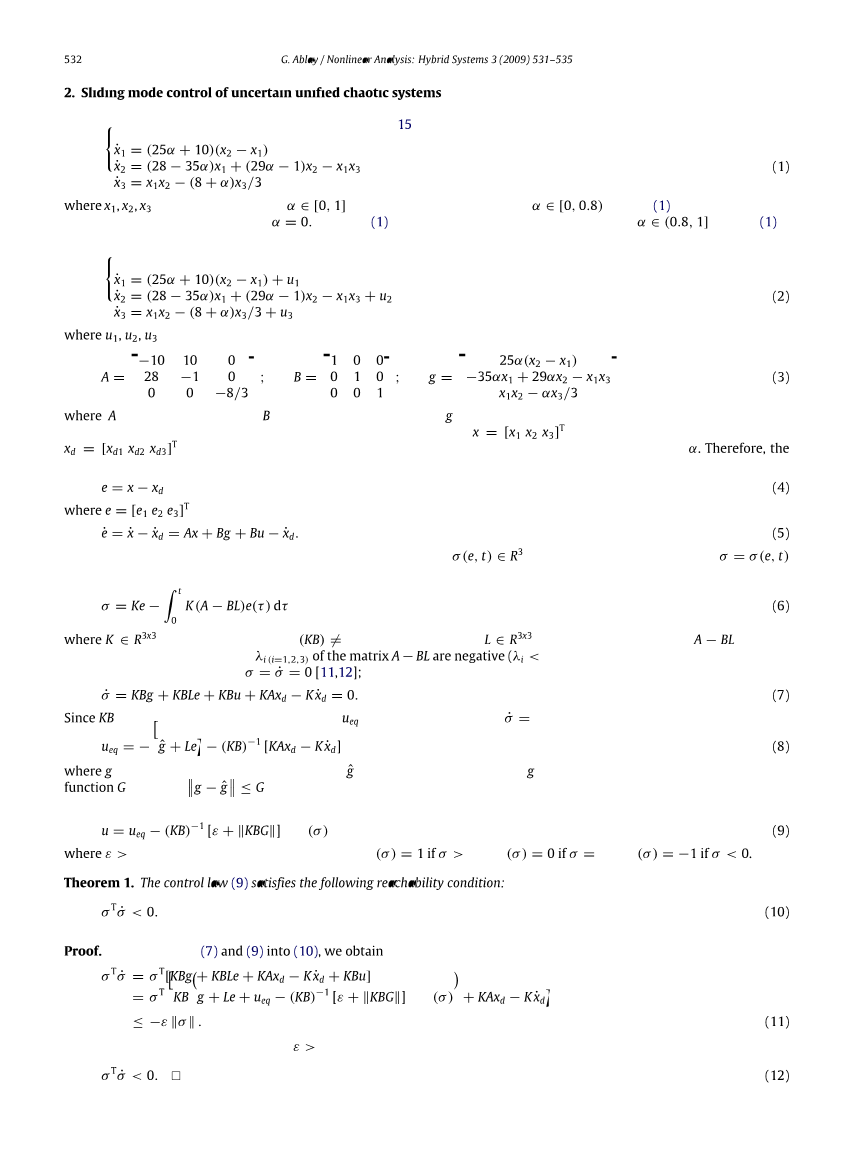
统一的混沌系统由Luuml;等人引入[15],只有一个参数:
(1)
其中是状态变量,是系统参数。当时,系统(1)称为广义Lorenz混沌系统,当= 0.8时,系统(1)称为Luuml;混沌系统,当时,系统(1)称为广义Chen混沌系统。
受控统一混沌系统可以改写如下:
(2)
其中是控制输入。我们有以下矩阵:
;; (3)
其中是系统矩阵,是控制矩阵,矩阵表示系统中的系统非线性加上参数不确定性因素。控制问题是在存在系统非线性和系统参数不确定的情况下获得状态,以跟踪特定的时变状态。因此,跟踪误差定义为:
(4)
其中是跟踪误差向量。动态误差可写成如下所示:
(5)
现在,时变比例积分(PI)滑动面由标量方程定义为:
(6)
其中是3的矩阵,为增益矩阵且行列式不等于0。为3的增益矩阵,它必须有一个稳定的,即,矩阵的特征值( = 1,2,3)均为负数(lt;0)。在滑动模式中,滑模面及其导数必须满足;
(7)
因为是非奇异矩阵,设等效控制是的解,因此
(8)
其中不是完全已知的,估计为,并且假设上的估计误差由已知函数限制,使得。为了在系统不精确的情况下满足滑动条件,我们在等效控制中添加了不连续项,定义了以下控制律:
(9)
其中gt; 0,符号函数定义为当时,当时,当时。
定理1:控制律(9)满足以下可达性条件:
(10)
证明:通过将(7)和(9)代入(10),我们得到:
(11)
对于,得到以下等式,表示满足到达能力条件:
(12)
图1 不确定统一系统的相图
图2 不确定统一系统状态变量的时间响应
3.数值模拟
这里给出的数值结果证实了以上方法的有效性。在数值模拟中,增益矩阵选择,使得是非奇异的。矩阵的期望特征值看作,并且通过使用极点配置的方法,增益矩阵计算结果为,矩阵计算得。 PI切换面为:
(13)
系统的初始条件取为。选择恒定控制器系数为。在模拟中,我们假设系统参数变化为。参考状态为。
因此,控制信号可以定义为:
图3 当控制信号在时间t = 0被激活时,不确定统一系统的状态变量的时间响应
图4 当控制信号在时间t = 0被激活时,不确定统一系统的滑动表面的时间响应
图5 当控制信号在时间t = 0被激活时,不确定统一系统的状态变量对的时间响应
在图1中,给出了不确定统一系统的相位图。在图2中,给出了不确定Lorenz系统的状态变量的时间响应。图2(a)显示状态变量,图2(b)显示状态变量,图2(c)显示状态变量。在图3中,参考状态被视为,并且在时间t = 0时激活控制信号后,状态变量,,和迅速收敛到零。图3(a)表示,图3(b)表示,图3(c)表示。图4表示出了滑动表面,和的时间响应。图4(a)表示,图4(b)表示,图4(c)表示。在图5中,参考状态看作,在时间t = 0激活控制信号后,状态向量,,和快速收敛到。图5(a)表示和,图5(b)表示和,图5(c)表示和。
4.结论
本研究提出了一种用于不确定统一混沌系统混沌控制的滑模控制方法。利用比例积分滑动面开发了滑模控制律,满足了到达能力条件。我相信这种方法将会被推广。
参考文献:
[1]S.H. Strogatz, Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry and Engineering, Perseus Books Publ., 1994.
[2]M.J. Ogorzalek, Chaos and Complexity in Nonlinear Electronic Circuits, WordScientific, Singapore, 1997.
[3]E. Ott, C.Grebogi, J.A.Yorke, Controlling Chaos, Physical Review Letters64(1990) 1196–1199. [4]J.J.Yan,et al., Controlling chaos of a chaotic nonlinear gyro using variable structure control, Mechanical Systems and Signal Processing21(6)(2006) 2515–2522.
[5]M.Chen,etal.,NonlinearfeedbackcontrolofLorenzsystem,Chaos,SolitonsandFractals21(2004)295–304.
[6] B.R. Andrievskii, A.L. Fradkov, Control of chaos: Methods and applications. I. Methods, Automation and Remote Control 64 (5) (2003) 673–713.
[7] A.L. Fradkov, R.J. Evans, Control of chaos: Methods and applications in engineering, Annual Review in Control 29 (2005) 33–56.
[8] M.T. Arjmand, etal., Chaos control in AFM systems using nonlinear delayed feedback via sliding mode control, Nonlinear Analysis: Hybrid Systems 2 (2008) 993–1001.
[9] J.F. Chang, et al., Controlling chaos of the family of Rossler systems using sliding mode control, Chaos, Solitons and Fractals 37 (2008) 609–622.
[10] J.J.E. Slotine, W.Li, Applied Nonlinear Control, Prentice-Hall, New Jersey, 1991.
[11] W.Perruquetti,J.P.Barbot,SlidingModeControlinEngineering,MarcelDekker,2002.
[12] V.I. Utkin, Sliding Mode and Their Application in Variable Structure Systems, Mir Editors, Moscow, 1978.
[13] T. Wen, et al., Adaptive regulation of uncertain chaos with dynamic neural networks, Chinese Physics 13 (4) (2004) 459–463.
[14] Y. Ueda, Random phenomena resulting from nonlinearity in the system described by Duffingrsquo;s equation, International Journal of Nonlinear Mechanics 20 (1985) 481–491.
[15] J.H. Luuml;, G.R. Chen, D.Z. Cheng, S. Celikovsky, Bridge the gap between the Lorenz and the Chen system, International Journal of Bifurcation Chaos 12 (2002)2917–2926.
[16] E.N.Lorenz,Deterministicnonperiodicflow,JournaloftheAtmosphericScience20(1963)130–141.
[17] G.R. Chen, T. Ueta, Yet another chaotic attractor, Int. J. Bifurcation Chaos 9(1999) 146–156.
[18] J.H.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18561],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

