英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
PID神经网络解耦控制除氧器压力控制系统的应用
摘要:除氧器压力和除氧器水位被应用在船舶蒸汽动力装置,传统的PID控制策略很难得到满意的控制结果。我们必须采取相对有效的控制方式。这篇论文采取了一个除氧器压力和除氧器水位的基于PID神经网络控制的方法,我们用它可以充分利用PID控制和神经网络的优点。仿真的结果展示了与传统的PID控制策略相比,这个PID神经网络去耦控制策略能提供更好的稳定性和更快的速度响应在除氧器压力和水位控制系统中。
关键词:蒸汽发电厂,除氧器压力,除氧水位,PID神经网络,去耦控制
1 引言
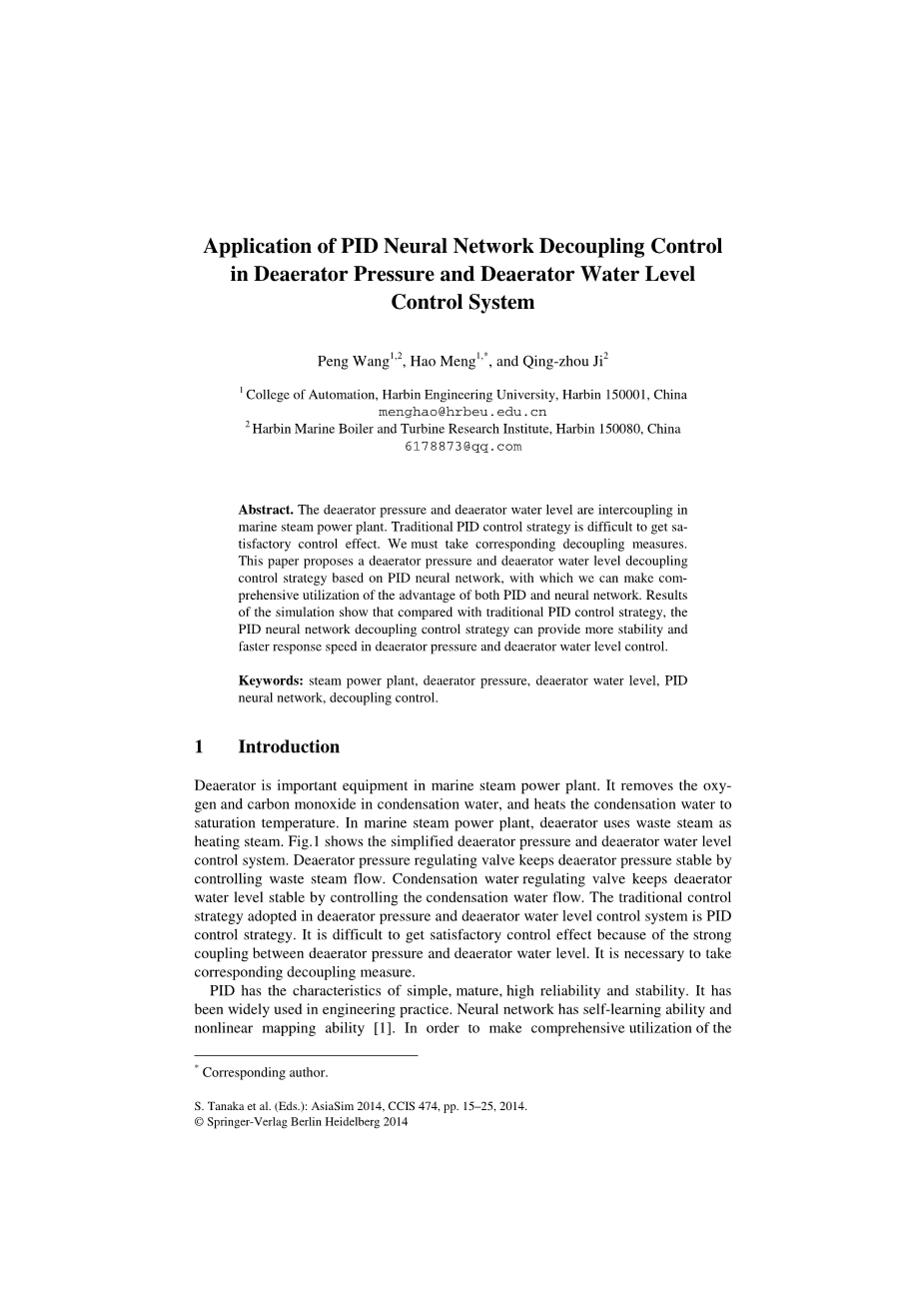
除氧器是一个很重要的设备在船舶蒸汽动力装置中。它清除了氧气和二氧化碳在冷凝水中,并且加热了蒸汽。图1展示了简易的除氧器压力和水位控制系统。除氧器压力控制了阀门一通过控制冷凝水流。传统的控制准则采用于系统中的是PID控制规则。这很难得到满意的控制结果因为PID和神经网络的优势,我们提出了基于PID神经网络的去耦控制标准,通过建立比例,积分和微分神经元充分符合比例微分和积分。然后我们建立一个实时全工况范围除氧器压力和除氧器水位系统的仿真模型,进行仿真来证明PID神经网络解耦策略的优越性。
图1 简化的除氧器压力和除氧器水位控制系统
2 除氧器压力和水位的模型
模型的第一步是进行如下的假设:1.热量辐射到大气中被忽略。2.具体的水的体积是压力或温度的功能。3.只有20%的除氧器金属参与了热反应。
蒸汽质量平衡方程如下:
这里是除氧的体积,是除氧水的体积。rho;是渗透的蒸汽密度,是加热蒸汽流动至除氧器,是水蒸发量,是排气蒸汽流动,是冷凝蒸汽量。水平衡方程式是
能量平衡方程式是
这里是饱和蒸汽压力,是饱和蒸汽焓,HW是加热水蒸汽焓。是冷凝水焓。是特定的脱氧器金属热量。MD是脱氧器金属量。是饱和蒸汽温度。A是单位换算系数。是加热蒸汽流动的数量。
蒸汽冷凝量是
饱和参数状态方程式
等式阐释了饱和度参数是和饱和蒸汽密度有关。FX1到FX5能被根据曲线工业标准IAPWS IF97(运用在水蒸气热力性质)计算曲线拟合公式。用现有的公式5取代现有的公式3,我们得到
根据公式2,我们得到
根据公式1,我们得到
PD能够被通过蒸汽热力性质计算。除氧器水位和VEW相关。和能够通过Runge-Kutta方法计算。
3 PID神经网络解耦的运用
3.1控制系统的设计
图2 这个除氧器的压力和水位控制系统基于PID神经网络解耦控制。
图2呈现了除氧器的压力和水位的控制系统基于PID神经网络解耦控制。除氧器的压力和水位模型被认为是多变量系统,并且具有双输入和微分作用强度在神经网中通过在线的研究来是的每个输出只与相应的输入有关。因此这可以被用来作为多变量控制的解耦系统。图2展示了PID神经网络解耦控制的结构。它有两层前馈神经网络PID命名W位NN1和NN2组成。每一个子网络有三层。这些是输入层和输出层。输入层有两个神经元,输出层有一个。有三个神经炎在每个隐藏层的子网。它们是比例神经元,积分神经元,和微分神经元。每个子网是和PID控制器等价的,及
S是子神经网络序列号s=1,2.es(k)是偏差KPS,KIS,KDS是比例系数,积分系数,和微分系数。它们和NN1和NN2的隐藏神经元是一致的。
NN1控制着除氧器的水位,通过控制着凝结水调节阀。NN2控制着除氧器的压力通过控制凝结水调节阀。NN1的输入是除氧器水位LD和它的设置的价值L0D.LD和L0D的差异相当于PID的偏差,即。根据公式10,我们计算出冷凝水调节阀的控制量,就是NN1的输出。N2的输入时PD和PD0.在NN2中,有。我们能计算出除氧器压力调节阀的控制量用同样的方式。包含着NN2神经网络的解耦控制,并且包含着NN1的神经元解耦控制。
3.2 神经网络结构
前向算法
- 输入层
输入和这一层的输出是一致的。输入,,,。输出是。i是输入层的序列号,i=1,2。
- 隐藏层
隐藏层的输入是,这里,是连接权值在输入层和隐藏层中间的,j是影藏层的序列号,j=1,2,3.隐藏层的输出是
3.输出层
输出是用每一个神经网的总和来权衡。即
这里,是连接权值在隐藏层和输出层。h是输出层的序列号。h=1。
BP算法
BP算法是主要的算法被应用在人工的神经网。它有思维清晰,简单的结构,好的学习能力并且容易意识到。它是最成熟的算法运用在人工神经网络而且被广泛的运用在很多领域。因此我们选择BP算法作为PID神经网络。学习的目的是缩小简化下面的等式
这里,l是每一个批抽样的序号。重量通过梯度算法改变。隐藏层和输出层的中间的权重是梯度算法是
这里,n是学习速度。
为了简化计算,部分的对象的输入偏微分的符号函数的相对变化的近似。近似只会轻微的影响学习网络的速度,但是能极大的简化计算。
能够用同样的方法计算。
这里。
3.3 选择初始权重的方法
神经网络的初始权重通常是随机选择的。初始权重不恰当的选择将会有严重的影响对于整个网络的表现。我们不需采取措施来克服随机选择的缺陷。PID已经管饭的被用用在工业中。有许多更多的经理来选择合适的P.I,D参数。由于PID神经网络和一个PID是相等的,PID的数据能够被用在来决定初始的连接权值。没有在一开始考虑到去耦,我们应该确保每一个PID神经网和一个单独的主循环是相等的。初始连接权重在输入层和隐藏层的是来完成映像从设置价值和过程价值到错误。因此我们选择w= 1,w=-1.初始连接权重的工程师来是的PID-NN1等于单独的循环PID脱氧控制器。PID-NN2等于单独的PID控制器的脱氧器水位。根据公式,我们选择
这个选择初始权重的方法能够确保小的超调和震荡,并且能加速反应速度。
4 仿真分析
4.1 仿真参数
为了认证PID神经网络的解耦控制策略,我们连接了PID神经网络解耦控制策略除氧器排气压力的数学模型,进行仿真,比较仿真结构和PID控制标准。主要的参数的数学模型是=251.7KJ/kg,,,,,。PID神经网络控制器的参数是,=0.3,=0.7,=1,,=0.6,。
4.2 结果和分析
仿真结构是用图3到图6来呈现出来。这能够从图4中看出当船舶速度增加,蒸汽动力装置的系统负荷增加了。锅炉水流D从16.5kg改变到41.5kg。D的增加导致饿了脱氧水的减少和水位偏差。相应的控制器改变了凝结水位位置u1。并且因此改变了冷凝水流。随着LD的减少,脱氧器压力PD减少。通过改变脱呀器压力阀位置u2,入口的废气流改变了。系统最终到达了,的稳定状态。
图3 除氧器水位误差
图4 除氧器压力误差
图5 进口废蒸汽流
图6 冷凝水流
和PID神经网络于PID相比,从FIG3到FIG6中可以得到当我们使用PID标准时候,超调量以及调整时间偏差(除氧器压力和水位)变得更大了。最大的除氧器压力超调量偏差和水位超调量减小了。尤其是在除氧水位上,最大的超调量是0.0033m。除氧器压力的调节时间和水位的偏差是220s和150s。进气流量波动和冷凝水流动也是更小的。仿真的结构展示了和PID标准相比较,PID神经网络去耦能够减少超调,加快转变的过程并且空大控制性能。
为了测试PID神经网络的鲁棒性,一个阶跃扰动改变了排气流量D从1kg/s到5kg/s被加入到系统中,时间t=300s。FIG5到FIG6展示了当扰动发生的时候u1和u2改变来反馈扰动。仿真结果阐释在FIG3和FIG4之中展示了当我们使用PID标准时候,最大的除氧器压力的误差是5KPa,设置时间是180s。最大的除氧器水位的误差是0.002米,设置时间是200s。当我们使用PID网络控制时候,最大的除氧器压力误差是4.5KPa,设置时间是160s。最大的除氧器水位的误差是0.001m,设置时间是180s。很容易得到结论即,PID神经网络控制能对于外界干扰进行迅速的反馈,并且迅速达到一个新的平衡。它具有更好的鲁棒性,比起PID标准来说。
5 结论
为了克服强烈的耦合在船舶蒸汽动力装置的除氧器压力和水位中,这个论文提供了一个去耦控制方式基于PID神经网络。我们也建立了一个真的时间完全的工作范围的除氧器压力和水位系统的仿真模型,进行了仿真和比较了PID神经网络控制方法的去耦策略和传统的PID策略。结果证实了PID神经网络去耦策略更为有效在除氧器压力和水位控制中。它能够明显的减少了除氧器压力和水位的超调量和调节时间,通过这个我们得到了满意的控制结果关于除氧器压力和水位的。它也有很强的鲁棒性。然而,策略的实用性和价值性仍然需要在实际工程实践中检验,尽管我们做了很多模型上的假定。
参考文献
1. Mahumod, F., Tarek, A.: Identification and Adaptive Control of Dynamic Nonlinear Systems
Using Sigmoid Diagonal Recurrent Neural Network. Intelligent Control and Automation
02(03), 176–181 (2011)
2. Li, H.J., Chen, M.J.: Design of decoupling PID controller for a kind of practical engineering.
Control Engineering of China 15(3), 275–278 (2008) (in Chinese)
3. Wu, J., Xu, Z.B., Ma, X.Q.: Numerical simulation on water level control model for deaerators
in nuclear power plants. Thermal Power Generation (3), 47–51 (2014)
4. Yin, W.: Research on Dynamic Modeling and Control method of Marine Condensationsteam
System. Harbin Engineering University, Harbin (2008) (in Chinese)
5. Sun, X.J., Shi, J., Yang, Y.: Neural Networks Based Attitude Decoupling Control for AUV
with X-Shaped Fins. Advanced Materials Research 2717(819), 222–228 (2013)
6. Shu, H., Shu, H.L.: Simulation of PID Neural Network Control System with Virtual Instrument.
In: Proceedings of Asia Simulation Conference 2008/the 7th International Conference
on System Simulation and Scientific Computing (ICSC 2008), p. 4 (2008)
7. Shu, H.L., Hu, J.T.: Study on Multivariable System Based on PID Neural Network Control.
Advanced Materials Research 2076(591), 1490–1495 (2012)
8. Cheng, Q.M., Zheng, Y.: Multi-variable PID neural network control systems and their application
to coordination control. East China Electric Power 11, 54–58 (2007) (in Chinese)
Application of PID Neural Network Decoupling Control 25
9. Sun, S.Q., Li, S.: Application of PID Neural Network in Head box Multivariable Decoupling
Control. In: 2nd International Conference on Consumer Electronics, Communications
and Networks (CECNet), pp. 2427–2430. IEEE (2012)
10. Shu, H.L.: Analysis of PID neural network multivariable control systems.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[30186],资料为PDF文档或Word文档,PDF文档可免费转换为Word

