
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
本科生毕业论文(设计)
英文翻译
题 目 多旋翼植保无人机设计实现
基于视觉的小型直升机X.R.B的参考模型滑模控制
Wei Wang 1, Kenzo Nonami2 and Yuta Ohira1
1 日本千叶大学科学与技术系
2 日本千叶大学工程学院
摘要:本文主要研究了小型无人机R.X.B的室内自主控制。当发生如地震这样的自然灾害时,对与那些人类无法安全到达的地方,一个可以自主飞行的MAV在危险环境或狭小空间内观测环境将会非常有效。此外,它还能有效防止二次灾害。本文论述了基于视觉的自主悬停控制,以及采用参考模型滑模控制的X.R.B的制导控制
关键字:MAV,图像处理,悬停控制,制导控制,参考模型控制,滑模控制
1.引言
人类对与空中悬浮非常着迷,其原因也许是我们生活在一个三维的世界,而人类的日常活动范围却仅局限为二维。或许人类有着克服他们生理局限性的强烈渴望,这表明,他们制造机器使他们能够进入三维世界,像飞机。这些机器的运动不会被局限在二维世界,一个能够自主飞行的小型机器适合于观测大气环境,而人类是无法做到的,或是存在核污染和生物危害或是其他极端环境的区域。因为当可以飞在空中时无论多么复杂的地理特征都不会成为问题,而且它还可以用于相当危险的地区,不仅可以单独工作,还可以数十或是数百台机器共同协调合作,以完成大范围的观测。微型飞行器(Micro Air Vehicle: MAV)是飞行器的一种新类型,它的目标规格为在任一方向长度小与15cm。将来,昆虫大小的无人机也在预想当中。美国国防高等研究计划署(DARPA)是美国微型飞行器发展最前沿的代表 [1][2][3]。
微型飞行器的发展开始于战争场地近距离的执行搜索行动使用的无人机,至于其它目的的应用,微型飞行器可以用于检测被NBC(核、生物,和化学武器)污染的地区,在通信有困难的地方作为无线电中继,或时飞行员逃脱时寻找降落点的救援行动等。
很显然,完成这样的任务,微型飞行器的飞行必须能自主而不是用无线电控制。但是, 在技术上存在许多的问题,特别是内嵌电源,通讯设备和传感器是很困难的。在本研究中,我们采用了总重12.3克的微型飞行机器人(mu;FR) 作为我们的被控对象并以视觉为基础实现自主悬停控制[4]。mu;FR的照片如图1所示。然而,由于mu;FR仍在研制阶段,很难用于实验。所以我们还采用X.R.B进行了实验, X.R.B是一种由Hirobo公司生产的无线小型直升机,如图2所示。
图1 微型飞行器mu;FR 图2 X.R.B
目前 ,一种能够实现自主飞行控制的无人机, 通过安装GPS,陀螺和加速度传感器等传感器几乎能够获取机体的各种飞行状态。但对于mu;FR和X.R.B而言,其载荷能力是有限的,因此,我们很难在机体上安装GPS和其他传感器。在本项研究中,我们采用CCD像机识别一个固定在机体底部,大小已知的方形标志以获得其三维坐标(标记位置检测方法)[5]。如果飞机飞行在相机拍摄范围内我们就可以测得其相对位置从而实现自主飞行控制。然而,当飞机离开相机拍摄区域时其自主控制将难以实现。为了扩展相机的观察范围, 当飞机移动时,我们使用电脑控制摄像机平台来追踪。作为一种小型无人直升机的控制方法,我们通常把控制系统分为三个控制回路-位置控制回路,速度控制回路和姿态控制回路 [6][7]。但本研究中我们无法采用这种方法,因为我们无法仅通过CCD相机获得被控对象的态度和速度。为此,我们提出了一种仅有一个位置反馈的简单控制回路系统。本文就介绍了X.R.B.的建模和参考模型滑模控制(MRSMC)技术。
2.被控对象
对于典型的直升机,其负载和悬停的能力是以降低其动态稳定性为代价。因此,直升机的飞行控制器是我们这个系统的关键。通过对其他几种模型的评估,我们选用一种正反转双转子配置的直升机进行此次研究。这种正反转配置由于采用两电机间的直接转矩补偿,因此具有高传输效率和优越的稳定性。我们选择的模型使用传统的完全控制下层电机,上层电机与稳定平衡杆成41度角。稳定平衡杆利用陀螺势力抵消轴倾角的突然变化,这使系统稳定性得到改善,当然同时也降低了控制命令的响应。有关实验表明,这种模型比常规单旋翼直升机具有更好的稳定,且更易于飞行控制。
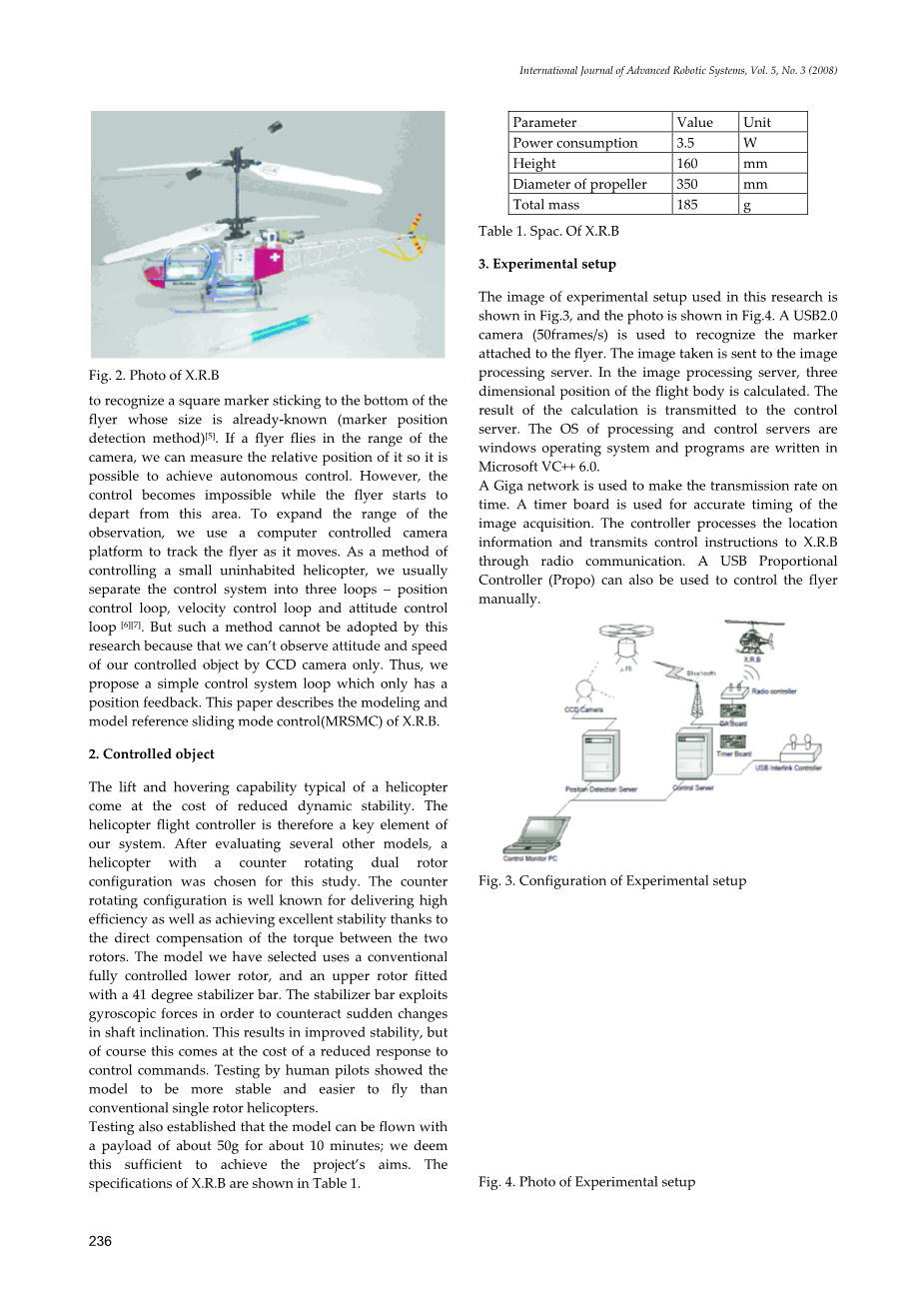
实验还表明,此模型可在负载50g的情况下飞行10min,足够达到此次项目的研究需要。X.R.B的规格见下表:
3.实验装置
该研究所用到的实验装置及其原理图如图3所示,实物照片如图4所示。一个USB2.0接口的相机 (50帧/s)用来识别固定在机体上的标记。获取的图像被送到图像处理服务器。在图像处理服务器中通过计算得出机体的三维坐标的位置。其计算结果发送给控制服务器。该操作系统的处理和控制服务器都是视窗操作系统,其程序在VC 6.0中编写。
我们采用基因网络是来确保及时的传输速率。采用一个定时器板用于控制精确的图像采集时间。该控制器处理位置信息并通过无线电向X.R.B发送控制命令。比例控制器(Propo)也可用于手动发送控制信号。
图3 实验设备配置
图4 实验设备实物图片
3.1 标记位置检测方法
一般来说, 只有当我们获得多幅物体在同一时间,不同位置所拍摄的图像时,才好进行目标的三维坐标计算。然而,因为此种技术需要很长的数据处理时间,对于微型飞行器却很难采用。为此我们使用了一个CCD相机通过识别方形标记[4][5],获得飞机的三维坐标。
然而,采用这类技术的缺点是可观测到的飞行区域狭小。如果飞机在稳定的盘旋是没有问题的,但当飞机遭遇大的震荡或是尝试大范围飞行时便会出现问题。为解决这个问题,我们尝试了多种方法,如使用一个广角镜头或是多相机系统。最终我们决定采用电脑控制摄像机平台(图5)来追踪飞行器,以扩大观测范围和和飞行范围。
图5 ccd相机和电脑控制相机平台
3.2 电脑控制像机平台
本文采用的计算机控制摄像机平台使用了一个精确的旋转平台来旋转底盘和倾斜。最大速度为 20°/s 。这个旋转平台通过USB接口与电脑相连。此外,还装有电位器用来测量平台的角度。然而, 当平台旋转时该平台驱动无法持续地收到指令,因此就无法连续的旋转相机以跟踪飞行器的运动。为此,我们不是在每个采样时间点移动相机,而是采用了如下技术:当飞行器偏离照相机的中线5°时,像机会旋转5°。这种先进的相机系统方框图如图6所示。当使用一个固定相机时,在飞行器距离相机1m情况下其在X和Y方向视觉范围约为60厘米times;60厘米,而当引入电脑控制相机平台时,对应的可识别范围可以扩大到140cmtimes;140cm,比原来大了四倍。
图6 相机系统方框图
4 建模及控制器设计
图7显示了本研究所采用的像机坐标系,以自主飞行控制开始工作时X.R.B的位置作为原点。X.R.B为正反转双旋翼飞行器,各个自由度的控制是通过调节的上下螺旋桨的转速和主机体的倾角实现的,因此其运动存在耦合关系。然而,我们很难对这样一个多输入多输出(MIMO)系统进行建模。在本研究中我们忽略了耦合运动并考虑将各个自由度作为一个独立的单输入单输出(SISO)系统,并以此设计控制器。由于模型的Z方向(高)和偏航运动可认为稳定的系统,我们采用PID控制, 甚至在没有具体数学模型的情况下通过调整其控制器参数其控制性能可以得到明显的改善。但对于X和Y方向,因为该模型具有不确定性,我们很难通过调整参数找到一个能使系统稳定的PID控制器增益。为此我们首先进行了数学建模,并提出一种基于模型的MRSMC控制器设计方法。
图7 坐标系
4.1 建模
因为X和Y方向在结构上是对称的,通过系统辨识所得到的X方向学模型的也同样适用于Y方向。首先我们假设从输入信号到姿态角的传递函数为
(1)
然而,由于机体的姿态无法测得,因此我们不能直接应用上述表达式。此外,从姿态角到位移的传递函数可由下式给出
(2)
由式1 2,我们可以得到由输入信号到位移的传递函数如下:
(3)
然后将实验所获得的输入输出数据送给MATLAB中的系统识别工具,以整定上式中的未知参数a0,a1,a2和k,所得到的状态方程如式(4)。
(4)
数学模型的频率响应如图8所示。 为了验证所建模型的准确性,进行了时间历程响应分析,其结果如图9所示。
图9 交互效度分析结果
4.2 控制系统设计
实际的直升机模型具有非线性和强耦合性。因此, 所设计的控制器在系统稳定性和其性能方面具有良好的鲁棒性, 便显得尤为重要。本研究中,我们设计了参考模型滑模控制器(MRSMC)对X.R.B的X和Y方向进行控制。
参考模型控制(MRC)自出现以来, 从简单的机械结构控制到复杂的机器人控制都有着广泛的应用。伺服系统通常要求系统在抑制扰动和信号响应方面精确控制,给出伺服系统参数的一个方便有效的办法就是采用MRC结构。这样结构的好处是伺服跟踪问题和调节器问题是分开的。在MRC系统中,对控制信号的期望响应由参考模型得到,并作为反馈回路的参考输入信号,其方框图如图10 所示。至此,反馈控制器的任务就是控制使实际系统输出与参考模型的输出偏差为零。一般来说,反馈控制器的设计要求系统对干扰和不确定性的响应不敏感。而SMC控制器因其较强的鲁棒性[8][9]而受到人们的关注。
4.2.1 参考模型的设计
我们可以由许多方法得到参考信号,在状态空间设计中,可以很方便的指定一个参考模型,使其状态直接对应系统识别模型的状态。即:
(5)
式中r为输入控制信号,令Cm=C,e=x-xm,则反馈回路的偏差的微分可由式4和式5想减得到,即
(6)
假设此系统满足如下条件
(7)
(8)
引入B的潘罗斯反矩阵B ,得到K1表达式
(9)
因为系统的直通增益调整为1时,输出ym则为跟踪输入信号,我们可以调整Bm, 使参考模型的稳态值将1。因为当时间近似无穷大时, 参考模型的直通增益将收敛于1,所以可由式5和式7得到K2=(-CmA-1B)-1, 则Bm可由下式算出
(10)
Am的值可通过调节得到,即
(11)
A1=3,a2=6,a3=5
系统的阶跃响应和斜坡响应如图10和图11所示
SMC反馈回路设计
为实现跟踪控制,在SMC控制中引入积分环节以提高系统的跟踪性能[9]。考虑到系统的控制目标是跟踪偏差ey趋于0 ,为此我们引入一个新的状态变量为偏差ey的积分,即
(12)
则扩展的系统为
(13)
对于偏差系统,定义切换函数为
(14)
(15)
当系统性能被限制在切换面,其等效输入ul=u可由式16得到
(16)
将u带入式13得到
(17)
由式17可得系统在零点出是稳定的,为
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31865],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

