英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
关于建筑活动所需的工作空间的自动生成
作者:Burcu Akinci1; Martin Fischer2; and John Kunz3
【摘要】:为了提供一个安全和高效的环境,项目经理需要规划施工活动所需的工作空间。工作空间规划涉及建筑活动所需的各种类型的空间的三维表示和跨时间的表示。由于一个构建计划包含数百个活动,需要多种类型的空间,因此实际上不可能期望项目经理手动指定表示工作空间四维所需的时空数据。本文提出了从通用工作空间本体和特定于项目的IFC自动生成特定于项目的工作空间的机制。这是基于4D生产模型。这些工作空间的生成导致了一个空间负载的生产模型。在这个模型中,工作空间被表示为与相关的构建活动和方法相关,并具有描述它们何时、何处、存在多久以及它们占用多少空间的属性。这些空间负载的生产模型使更丰富的4D CAD模拟、时空冲突分析和施工前的主动工作空间规划成为可能。
【标识符】:10.1061/~ASCE!0733-9364~2002!128:4~306!
【CE数据库关键词】:工作空间;项目管理;施工方法;调度。
介绍
空间是建筑工地的关键资源之一。许多施工过程模型,如Sanvido的模型(Sanvido 1984),Howell的模型(Oglesby等人. 1989),工作流程模型(Hetrick和Khayyal 1987),因子模型(Thomas和Sakarcan 1994),列出工作空间作为建筑活动所需的主要资源。这些模型表明,活动空间需求和活动的其他资源需求一样,可以在计划和调度期间进行管理。
在规划和调度过程中缺乏对活动空间需求的管理,会导致时间空间的冲突,其中一个活动的空间需求会干扰另一个活动的空间需求或现场工作。目前,建筑工地经常发生时空冲突,例如Riley和Sanvido 1997年事件,并严重阻碍干扰活动的进行。Rad,1980年。Oglesby等人1989年,Sanders等人1989年,Howell 和 Ballard 1997年,Akinci 2000年等等。
与其他资源需求相比,建筑活动工作空间的管理提出了独特的挑战。对大多数资源的需求,如劳动力、设备、物质,只能随着时间改变。然而,活动所需的空间在所有三个维度中都会随着时间而变化。此外,活动需要的空间类型多样,各有不同的位置要求。(Riley 1994;Akinci 2000)
最后,当要求建筑负责人描述他们需要的空间时,他们一般使用定性的位置描述。,“外面的组件”,“下面的劳动人员空间”等等。这些通用的空间描述需要根据特定于项目的数据进行解释,以在x、y、z和时间维度中表示特定于项目的工作空间。因此,对于项目工程师来说,用4D模型来表示具体项目的活动空间需求是非常繁琐的。需要自动化机制来生成活动所需的特定于项目的空间,并在四个维度中表示这些空间。
本文重点讨论了这种需求,并描述了自动生成构建活动的工作空间需求的方法。它具体描述了生成微级活动空间需求的方法。例如,劳动人员空间、设备空间、危害空间,代表核心空间,可执行相关的建设活动。在本文的其余部分,术语“微级别空间”和“工作空间”将互换使用。
在本文的研究中,我们开发了一个原型系统,4D WorkPlanner Space Generator(4D SpaceGen),基于用户定义的通用空间需求知识和具体项目的生产模型,自动生成活动的工作空间需求(集成的产品和过程模型)的信息。本文介绍了4D空间的系统结构和实现工作空间自动生成的机制。
1.卡内基梅隆大学土木与环境工程系助理教授,PA 15213-3890。电子邮件:bakinci@cmu.edu
2.副教授,土木与环境工程学系。计算机科学,主任,综合设施工程中心,斯坦福大学,斯坦福,加州94305。电子邮件:fischer@ce.stanford.edu
3.斯坦福大学集成设备工程中心高级研究员,加州斯坦福CA94305。电子邮件:kunz@ce.stanford.edu
请注意。讨论将持续到2003年1月1日。个别论文必须单独提交讨论。若要将截止日期延长一个月,必须向ASCE执行编辑提交书面申请。论文手稿已于2000年7月13日提交审查并可能发表;2001年2月2日通过。本文发表于2002年8月1日《建筑工程与管理》第128卷第4期。copy;ASCE, ISSN 0733-9364/ 2002/4-306-315 /$8.001每页50。
积极的情况
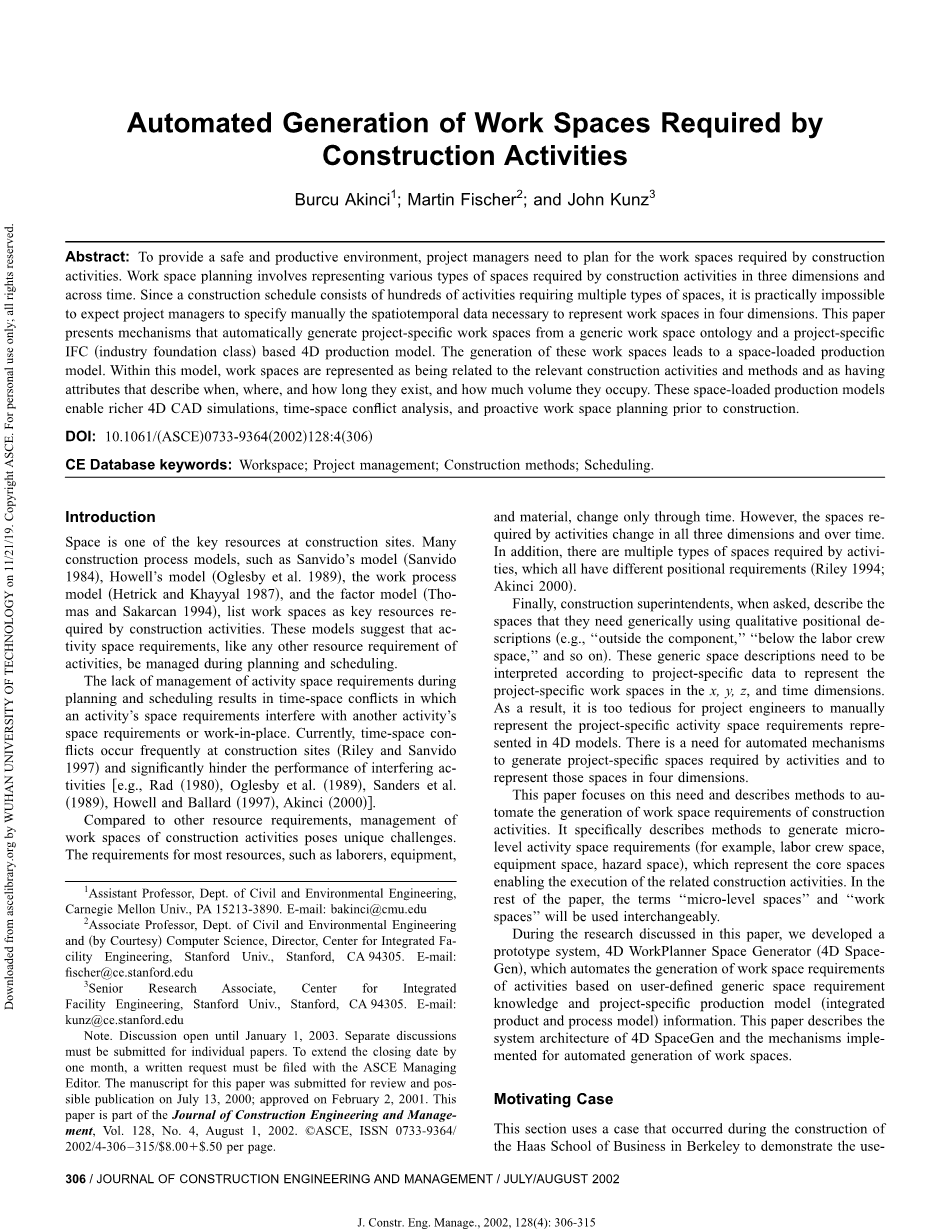
本节将使用一个发生在伯克利哈斯商学院(Haas School of Business)的建设案例来演示生成的有效性和代表不同类型的微程序级空间所需的建设活动和显示当前项目管理工具的局限性使工作空间的管理。图1中(a和b),显示快照从4D CAD模拟两个不同的时间表组成的四项活动一侧的建筑:脚手架安装和拆除,窗口安装,和c通道安装。
图1所示。甘特图和4D CAD模拟两种不同的时间表
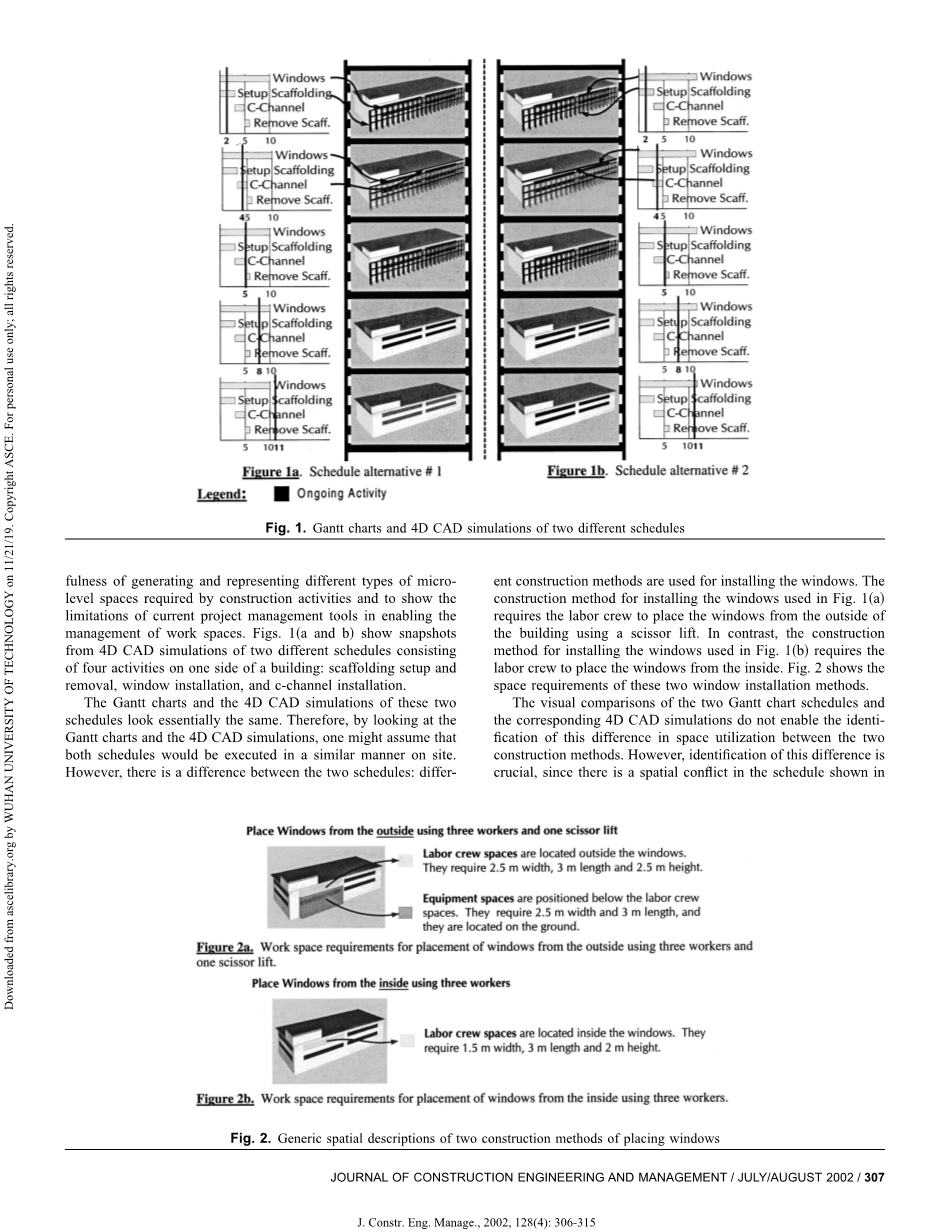
这两个时间表的甘特图和4D CAD模拟看起来基本上是一样的。因此,通过观察甘特图和4D CAD模拟,人们可能会认为这两个时间表将在现场以类似的方式执行。然而,这两个时间表有一个区别:不同的施工方法用于安装窗户。图1a所示窗户安装施工方法要求工作人员使用剪刀式升降机将窗户从建筑物外面放置。相比之下,图1b所示的窗户的安装方法,要求工人从内部安装窗户。图2为两种窗口安装方式的空间要求。
图2所示。两种窗户构造方法的一般空间描述
图3所示。空间加载4D CAD模拟突出了两个时间表之间的差异
两个甘特图时间表的视觉比较和相应的4D CAD模拟不能识别这两种构建方法在空间利用方面的差异。然而,这种差异的识别是至关重要的,因为图中所示的时间表存在空间冲突。在图1a中c通道安装所需的脚手架与窗口安装所需的劳务人员和设备间的距离。相比之下,在图1b所示的日程安排中则没有这样的冲突。因此,图1a中的日程安排不能按计划执行,但是图1b中的日程可以在活动之间不存在任何空间冲突的情况下实现。
4D CAD模拟可以通过添加建筑活动所需的空间来提供更多信息。图3a和图b分别显示了图1a和图b中两个时间表的4D CAD仿真图。空间加载4D CAD模拟显示了活动所需的空间,以及正在安装的建筑组件。在图3所示的空间加载4D CAD仿真中,两种调度方案之间的差异及其相应的空间冲突问题比图1所示的基础4D CAD仿真更为明显。通过对空载4D CAD仿真的可视化分析,用户可以识别出第一个调度中存在的三个冲突。
本文描述的研究项目的目标之一是自动生成在四个维度中表示的工作空间,从而自动创建空间加载的四维模型。
相关研究
研究人员尝试了许多不同的方法来自动化考虑活动空间需求的规划和调度。我们的研究主要建立和扩展了静态和动态布局规划和空间调度方法在这里描述。
1. 静态或动态的地盘布局规划(Eastman1975;Tommelein et al. 1991, Tommelein和Zouein 1993;Choi和Flemming 1996;Alshawi 1997;Hegazy和Elbeltagi 1999):根据用户定义的定性和定量邻接约束(例如,接近、远离等),站点布局规划算法自动分配宏级空间,即位于站点上的粗空间。因此,场地布局规划的机制主要是关于空间之间的邻接,以产生具体项目的空间应该位于场地的位置。
我们的方法类似于站点布局规划,因为两者都是从通用的用户定义的约束生成特定于项目的空间。然而,我们实现推理的机制主要是关于空间的朝向,并假设一个特定的邻接条件。这种假设的主要原因是,根据定义,微级别空间位于要安装的组件附近。例如,在上面描述的情况中,劳务人员空间被定义为位于窗户之外,没有明确的邻接描述(例如,在美国,劳务人员的工作空间靠近窗户。该空间需求描述应用于微观空间表示上下文时,假设劳动人员空间连接到窗户的外部(图。2a)。
因此,在生成微级别空间时,关于空间方向的推理比关于空间之间邻接的推理更重要,因为在所有情况下都隐含地假定所有微级别空间都连接到其引用对象的相关边。由于在场地布局规划中实施的机制大多是关于相邻的,所以它们并不完全适用于微级空间的生成。我们的方法是对场地布局规划方法的补充,通过形式化的机制来对工作空间的定性方向描述进行推理。
2. 空间调度(Tommelein et al. 1992;Zouein和tommele1993年;莱利1994;Thabet和Beliveau 1994;Choo等人,1999)。空间调度方法侧重于构建活动所需的不同类型的工作空间的建模。因此,在空间调度中建模的空间类型与我们的工作类似。然而,空间调度假定用户指定特定于项目的活动空间需求的几何属性。空间调度中的算法主要是在用户定义了所有的微观空间后,创建一个调度来消除空间冲突。如果将此方法应用于图1a所描述的情况,用户将必须定义一个(x, y, z)插入点,以及活动所需的总共11个不同空间的x、y、z坐标上的相应维度(图1a)。图(3)。考虑到在给定的日程安排中,数百个活动需要多种类型的空间,因此实际上不可能期望用户手动描述和输入这些活动空间需求(Akinci 2000)。虽然分散的建筑管理方法可以减少用户输入的数据数量,但是用户的数据需求仍然很大,使得手动输入空间信息非常耗时。例如,一个窗口分包商打算使用一个摇摆台安装窗口,他必须为设计模型中的每个窗口在x、y、z和时间(t)维度上建模三种类型的空间(工人空间、设备空间、危险空间)。一般来说,中型建筑有数百个窗户。这表明中型建设项目分包商需要一个窗口输入300空间实例,同样的顺序指定约2400数据点代表每个空间x, y, z,和t。因此,即使是在分散的系统是非常耗时的手工输入和更新的每个点。
我们的方法一般地获取与所使用的施工方法相关的空间知识,并基于建筑物的产品模型,根据CAD模型中表示的参考对象的体积自动生成特定于项目的空间。因此,它减少了用户输入大量数据来表示项目特定的活动空间需求。此外,用户可以快速地更改构造方法和活动序列,并且仍然可以在模型中显式地考虑每个活动的工作空间需求。
简而言之,建筑空间管理文献描述了有用的背景,但没有描述自动化生成微级活动空间需求的详细方法。我们的研究补充了这一领域的研究,通过形式化必要的机制,从空间需求的一般定性描述和特定项目的生产模型生成特定于项目的微观级构建空间。
4D WorkPlanner空间生成系统架构
4D工作计划空间发生器(4D空间)自动生成和可视化显示项目特定的活动空间需求。图4为IDEF图(SoftTech 1981),并使用“从剪刀式升降机放置窗户”的施工方法来突出显示系统的具体输入和输出。以图2为例。
4D空间采取了一个ifc为基础的(AI 1998)4D生产模型-一个集成的产品和过程模型-作为输入(图。4 )这个4D的生产模型是由另一个系统,Construction Method Modeler (Aalami 1998)生成的,其中用户定义将用于安装某些组件组的构造方法,系统自动生成安装构建组件所需的活动,并将这些活动链接到构建组件。因此,4D生产模型将施工活动与建筑构件、所需资源和选择的施工方法联系起来。还有其他商业上可用的方法将建筑活动与建筑构件联系起来。现成的4D CAD系统,如bentley时间表模拟器(bentley2001)提供一个集成环境,用户可以手动将构建活动链接到相关的构建组件。因此,这些4D CAD系统的输出还可以提供一个集成的产品和过程模型,以供4D WorkPlanner空间生成器输入。
4D SpaceGen假设生产模型中的细节级别为3周的提前计划,其中活动根据其动作类型分解,并与成批组件相关。在这种情况下,批量表示用户根据现场使用的施工方法和安装模式确定的适当的细节级别。我们选择表示这个层次的细节,因为在这个层次上的生产模型开始有关于活动将如何执行的有意义的表示(Halpin和Riggs 1992;巴拉德1997年)此外,这一层的生产模型表示方法比基本场作用层的表示方法更少细节,因此更易于管理(Halpin和Riggs 1992)。
4D SpaceGen首先要求用户填写与将要使用的每种施工方法相关的空间模板。监督员或项目工程师是系统的用户,因为他们知道在特定组件的构建过程中使用的不同类型的构建方法。有四个空间模板,分别与劳动人员空间、设备空间、危险空间和保护空间要求相关。每个空间模板要求用户描述特定空间类型相对于其引用对象的方向。用户还定义每个模板中所需的空间大小。Akinci (2000 )描述所开发的空间模板,以捕获与所应用的构造方法相关的活动空间需求信息。图4中的控制框显示了用户在空间模板中定义的信息。
4D SpaceGen使用特定于项目的4D生产模型信息解释用户定义的一般空间描述,并生成在四个维度中表示的特定于项目的活动空间需求。图4中的输出框显示了活动空间需求的具体项目表示。4D SpaceGen输出一个空间负荷生产模型,其中项目特定活动空间需求信息与初始4D生产模型表示相集成,类似于活动的任何其他资源需求(图。4 )
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[240920],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

