
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
多体系统动力学9: 377–387, 2003.
copy; 2003 鲁维尔学术出版社.于荷兰出版
377
浮式起重机运作中的非线性动力学
KATRIN ELLERMANN,EDWIN KREUZER
德国汉堡D-21071,汉堡-哈尔堡工业大学,机械与海洋工程专业,
E-mail: {ellermann,kreuzer}@tu-harburg.de
(收稿日期:2001年11月7日;修订后接收日期:2002年7月12日)
摘要. 本文对浮式起重机中的非线性动力学进行了研究。研究发现由起重机船体、负载及非线性系泊系统所组成的系统的运作具有各种非线性现象。对船体或负载运作高度依赖于初始条件或干扰的操作条件尤其感兴趣。一项参数的微小变动中的分歧会引起一个更大的动力质变,且往往会限制保存操作的范围。
由于浮式起重机定期受水波的影响,笔者用不同精确工具来研究共振与分谐波运动。多尺度方允许频域分析,并且算法后的路径被运用在数值分叉分析上。两者的结果相互吻合并且都为起重船体操作条件的评估提供了工具。
关键词:浮式起重机、多体系统、非线性动力学、分叉、分谐波运动。
引言
多体系统的振幅研究是近海工程专业的主要兴趣所在。一方面是风浪激起的海洋结构,另一方面是包括数艘船体与昂贵的货物在内的操作过程的安全性最是有趣。因此,人们认为操作时应避免大幅振动动作特别是碰撞。
本文中的浮式起重机指的是一种起重驳船。这些驳船主要用于海岸及港口区域。其对海浪运动尤为敏感。
大量文献致力于令人失望的起重机负载运作的分析和控制,例如[2–7, 9]。已被记录在案理论的、实验的及数值的研究反映了在起重机动力学的强烈兴趣。起重机动力学研究的不同理论方法被广泛讨论。运作的等式式可被简化为一组线性微分等式,从而确定传递函数[7]。这种方法为微小振幅运作生成良好效果并且接近于线性下锚系统,但它无法描述诸如谐波运动或是共存吸引之类的任何非线性效应。
作为一个选择性调查,负载的激发可由起重索枢轴点的运动决定。负载对船体运动的影响被忽略了。这产生了一项参数激发的动力学模型,如 [2]中所述。这样的方式可用于庇护盆地中的船体,且在负载与船体比例非常小的情况下。若这些条件都不满足,则需要使用一个更详细的系统描述船体动力学那时则会被船体与负载运动间的强耦合以及系泊系统的特征所影响。
一般情况下,定期力系可以呈现从周期到分谐波或准周期运动到混沌行为的不同的非线性现象。即便并非所有的此类现象都存在于特定的系统当中,它们也常常存在于特定的参数组中。起重船的数学模型包括非线性,很可能显示出期间倍增的情况且混沌行为也会在调查系统运动中发生,如[5]中所示。为对不同参数组合对起重船动力学的影响进行系统研究,提出了一种方法,用两种不同的数学工具进行分析。一种多尺度技术允许在频域及其导致的解析解中对非线性动力系统进行研究。另一种技术运用路径分析法来探查周期解的分叉。两种数学工具提供周期性反应的有关信息包括谐波和谐力系的分谐波运动并两相符合。
建模
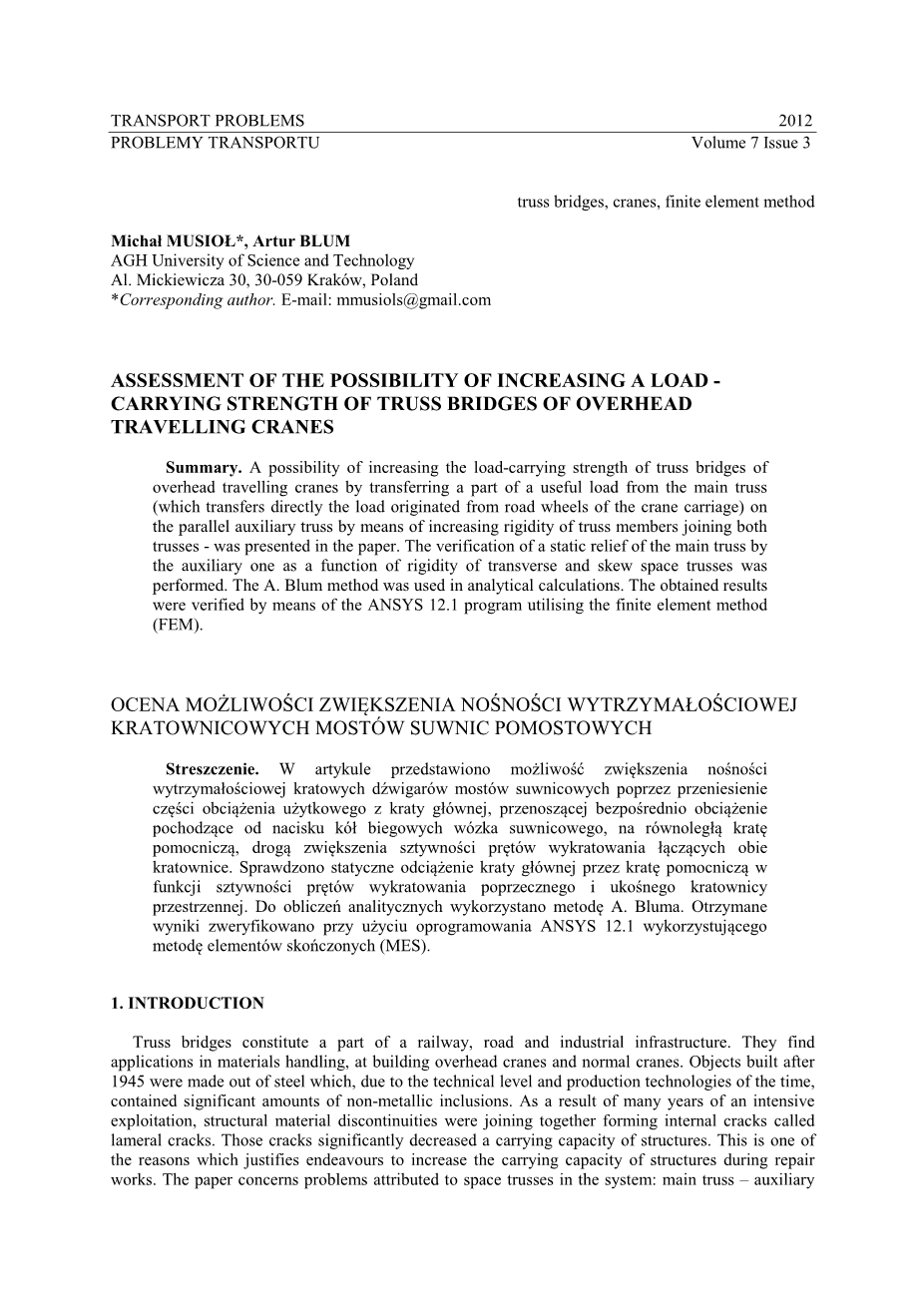
浮式起重机图纸为图1。船体模型为一个刚体结构,负载为点质量。嘉定所述浮式起重机可在垂直平面中自由移动,位置与方向的计算为:
T
向量 y = [x, theta;, z, alpha;] .
基本的数学模型的潜在数值与分析研究在 [3]中有详述:运动等式式嘉定采取四自由度的多体系统形式
M(y)yuml; k(y, y˙ ) = q(y, y˙ , K) (1)
带质量矩阵M,广义的科里奥利和回转力k,广义外力q 以及扰动频率K。点表示时间t的衍生物。为建模而嘉定浮式起重机在垂直平面自由移动。
图1 起重船建模
钩子和船体重心的坐标分别为(xa, za)与(xs, zs)。绳子长度l保持恒定。驳船和负载的质量为mp和ml,驳船的惯性矩为Iyy。流体结构的相互作用为使用附加质量ax、atheta;、az,附加阻尼bx、btheta;、bz,以及光波激振力fsx、fstheta;、 fsz。附加质量和阻尼取决于船体的运动频率w。表明
m11 = mp ml ax(omega;), kappa; = lmlxa, m12 = zsmp zaml, m23 = lmlza, m13 = lml, mx = xsmp xaml,
m22 = (z2 x2 )mp (z2 x2 )ml Iyy atheta; (omega;),
s s a a
mz = mp ml az(omega;), (2)
质量矩阵M可写作
m11 m12 cos theta; 0 m13 cos alpha;
minus;mx sin theta;
m12 cos theta; m22 minus;m12 sin theta; m23 cos(theta; minus; alpha;)
minus;mx sin theta; minus;mx cos theta; minus;kappa; sin(theta; minus; alpha;)
0 minus;m12 sin theta; mz minus;m13 sin alpha;
M =
minus;mx cos theta;
(3)
,
m13 cos alpha; m23 cos(theta; minus; alpha;) minus;m13 sin alpha; l2ml
minus;kappa; sin(theta; minus; alpha;)
广义陀螺仪和科里奥利力向量为
minus;theta;˙2((xs mp xaml) cos theta; (zsmp zaml) sin theta;) minus; lml alpha;˙ 2 sin alpha;
2
k lml alpha;˙
=
2
(za sin(theta; minus; alpha;) xa cos(theta; minus; alpha;))
2
(4)
,
theta;˙ ((xsmp xaml) sin theta; minus; (zsmp zaml) cos theta;) minus; lml alpha;˙
minus;lml theta;˙2(xa cos(theta; minus; alpha;) za sin(theta; minus; alpha;))
cos alpha;
且广义外力向量为
minus;0.5tgbcd rho;x˙ |x˙ |minus; bx x˙ s0x fsx minus; c1x minus; c2x|x|minus; c3x3
minus;g((xsmp xaml) cos theta; (zsmp zaml) sin theta;)
minus;hmg(mp ml)theta; minus; btheta; theta;˙ s0y fstheta;
q =
minus;Awrho;gz minus; bzz˙ s0z fsz
minus;glml sin alpha;
(5)
.
路径跟踪技术进行的运动集合等式以及分叉分析不要求等式进一步简化(1)。为了运用多尺度方法与解析近似y产生,
- 非线性向与二次及三次多项式近似,
- 忽视恒定的漂移力,且
- 假定起重船完美平衡。
然后,运动等式式按格式重写
Mmacr; yuml; Kmacr; y = Fmacr; (y, y˙ , yuml; , K), (6)
恒定矩阵Mmacr;、Kmacr;与所有F中的非线性项、阻尼和外力。
使用模态分解y(t) = 8q(t),可以变运动等式 (6)为其正常形态
quml; K2q = Q(q, q˙ , quml; , K), (7)
0
其中8 = [phi;ij ]为保守系中的模态矩阵,K2 =
0
diag{... omega;2 .. .}为本征频率的对角矩阵。等式(7)中仅有的耦
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153944],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

